|
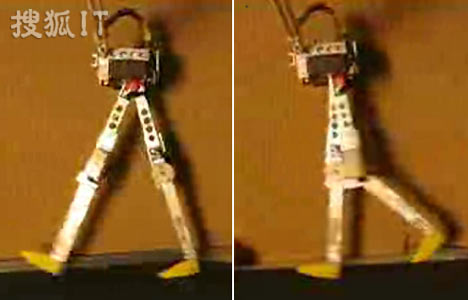
【搜狐科学消息】北京时间7月14日消息,德国机器人工程师日前对一个“奔跑机器人”做出改进,使其成功依靠双腿爬上斜坡。这是机器人模拟人类行走取得的重要突破。 这一“奔跑机器人”由双腿及躯干组成。在最初两三次爬坡尝试中,该机器人失去平衡并向后跌倒。不过,它很快修正了自己的行走方式:保持上身直立,减小步伐并使躯干部分向前倾。当成功抵达平地后,该机器人又将行走方式调整至正常状态。 “奔跑机器人”此前已创造了机器人行走速度的最快记录,每秒钟行走的距离超过自身腿长的3倍。此次,制造该机器人的德国工程小组给它安装了红外眼睛以及加速传感器,用于模拟人类内耳的平衡机制。这两个元件被连接到机器人的“大脑”,即神经网络,从而决定在遇到斜坡时机器人应该做出怎样的调整。 “奔跑机器人”具有髋关节以及膝关节,均通过伺服电动机来进行驱动。该机器人70%的体重都集中在躯干,因此只要稍许调整姿态就能防止跌倒。此外,该机器人的大脑具有学习功能,通过经验的积累,其表现会越来越好。 德国哥廷根大学佛罗伦丁-沃格特教授及其同事在网络期刊《公共科学图书馆-计算机生物学》上描述了机器人行走的情况。文章称:“该机器人能高速行走,并通过自我调节以减小干扰,此外它还可以用机器人的方式快速调整步态。同时,在获得一些学习经验后,它能够在不同地形上行走。” 模仿人类行走的机器人曾经只存在于科幻小说中,真正实现起来有很大困难。不过,如果希望机器人能够为家庭服务,例如协助购物、照顾老人等,用双腿直立行走的能力是必不可少的。(雅龙) | 


 11010802026271
11010802026271



 IP卡
IP卡 狗仔卡
狗仔卡
 发表于 2007-7-15 23:21
发表于 2007-7-15 23:21

 收藏
收藏 分享
分享 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 显身卡
显身卡 楼主
楼主 发表于 2007-7-16 04:56
发表于 2007-7-16 04:56